A team of MIT engineers is designing a kit of universal robotic parts that an astronaut could mix and match to configure different robot species for various missions on the moon. Robots can be used for heavy lifting by laying cables, deploying solar panels, erecting communication towers and building habitats.
A robot can be disassembled once a mission is completed, and its parts can be used to configure a new robot for a different task. This system is called Walking Oligomeric Robotic Mobility System (WORMS) – the parts include worm-inspired robotic limbs that an astronaut can easily snap onto a base and make it into a walking robot. Moreover, the parts can be configured to build, such as large pack bots capable of carrying heavy solar panels up a hill. The same could be reconfigured into six-legged spider bots that can be lowered into a lava tube to drill for frozen water.
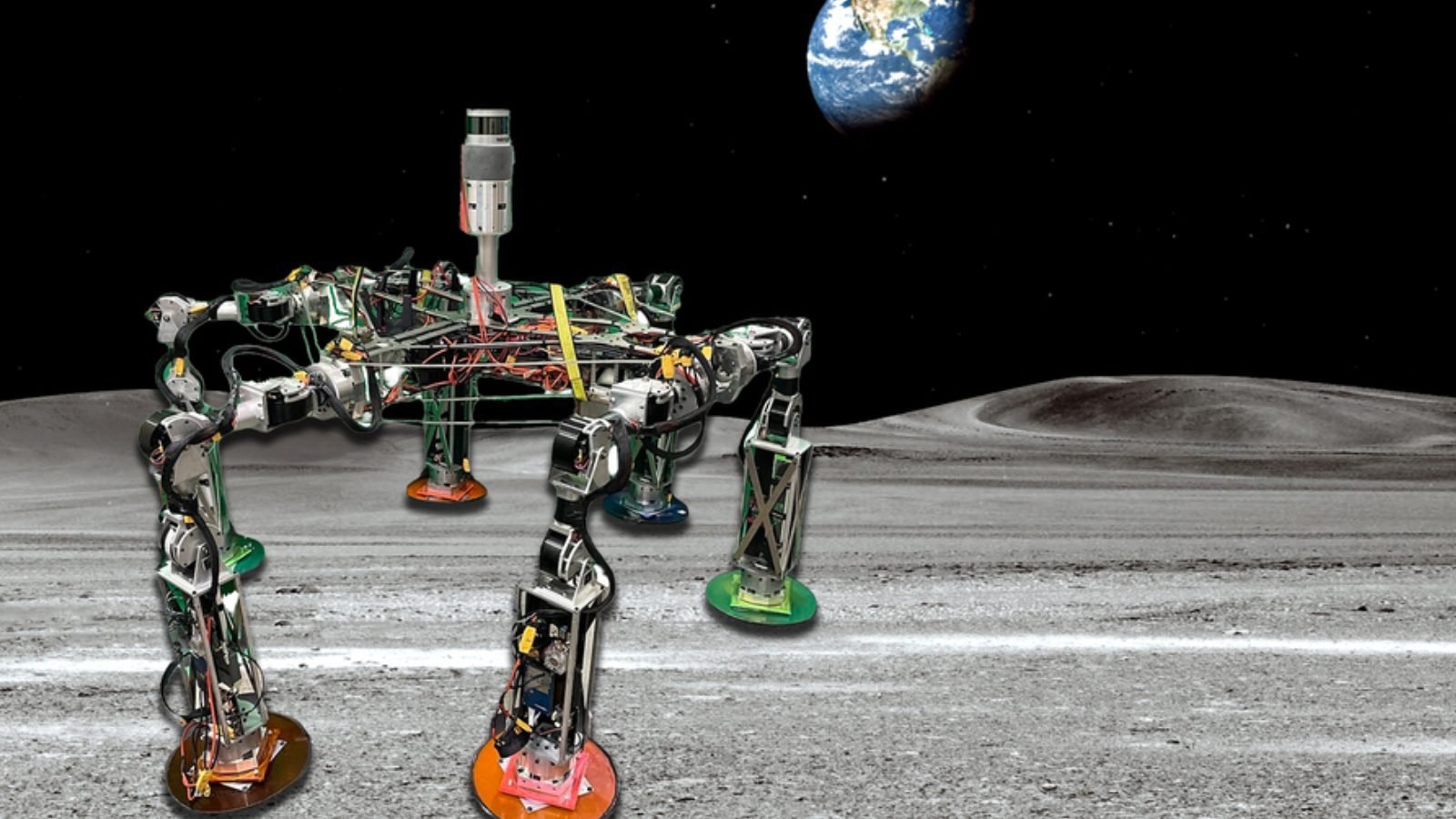
George Lordos, the team leader and graduate instructor in MIT’s Department of Aeronautics and Astronautics, highlighted that the engineers have built and demonstrated a six-legged WORMS robot. “Astronauts could go into the shed, pick the worms they need, along with the right shoes, body, sensors and tools, and they could snap everything together, then disassemble it to make a new one.” Lordos said the design is flexible, sustainable and cost-effective.
Answer to NASA’s BIG Idea Challenge
Developed in 2022, WORMS is an answer to NASA’s Breakthrough, Innovative and Game-changing (BIG) Idea Challenge, which is an annual competition for university students to design, develop, and demonstrate a game-changing idea. NASA challenged students in 2022 to develop robotic systems that can move across extreme terrain, without the use of wheels.
The onus was taken up by MIT’s Space Resources Workshop for a lunar robot design that could navigate the extreme terrain of the moon’s South Pole, which is marked by thick, fluffy dust, steep, rocky slopes, and deep lava tubes. This area also host permanently shadowed regions that could contain frozen water (essential for sustaining astronauts). The students drew inspiration from animals, noting that some could be suited to certain missions.
Animal-Inspired Robots
Michael Brown, the deputy team leader and AeroAstro graduate student, highlighted the worm, one of the simplest animal that makes similar movements as an arm, or a leg, or a backbone, or a tail. He said it struck an idea, “We could build all these animal-inspired robots using worm-like appendages.” Brooke Bensche, AeroAstro undergraduate, shared that the idea was that, with just a few parts, combined in different ways, you could mix and match and get all these different robots.
He explained the system’s main parts include the appendage, or worm, which can be attached to a body, or chasis, via a universal interface block, that snaps the two parts together through a twist-and-lock mechanism; it can be disconnected with a small tool that releases the block’s spring-loaded pins. Jacob Rodriguez, another team member, hopes to add more snap-on sensors and tools, such as winches, balance sensors, and drills.
Furthermore, the team developed a software that can be customized to coordinate multiple appendages. The team created a six-legged robot about the size of a go-cart. Once assembled, the robot’s independent limbs worked to walk over level ground. The robot could be easily and swiftly assembled and disassembled in the field, and on a desert site in California.